ผลกระทบจากการเชื่อมของหุ่นยนต์เชื่อมได้รับผลกระทบจากหลายแง่มุม ลูกค้าจำนวนมากจะพบปัญหาบางอย่างไม่มากก็น้อยก่อนที่จะเชี่ยวชาญในการใช้หุ่นยนต์เชื่อม โดยทั่วไป ปัญหาเหล่านี้เกิดจากการทำงานที่ไม่เหมาะสมหรือการตั้งค่าหุ่นยนต์ที่ไม่เหมาะสม และสามารถแก้ไขได้ด้วยการปรับแต่งที่เหมาะสม ต่อไปนี้บรรณาธิการจะพาคุณไปสำรวจปัญหาบางอย่างที่มักเกิดขึ้นในการใช้หุ่นยนต์เชื่อม Yunhua และวิธีแก้ไขที่เกี่ยวข้อง
1. การเริ่มอาร์คไม่สำเร็จในระหว่างการเชื่อม
1.อาร์คยังไม่เริ่ม
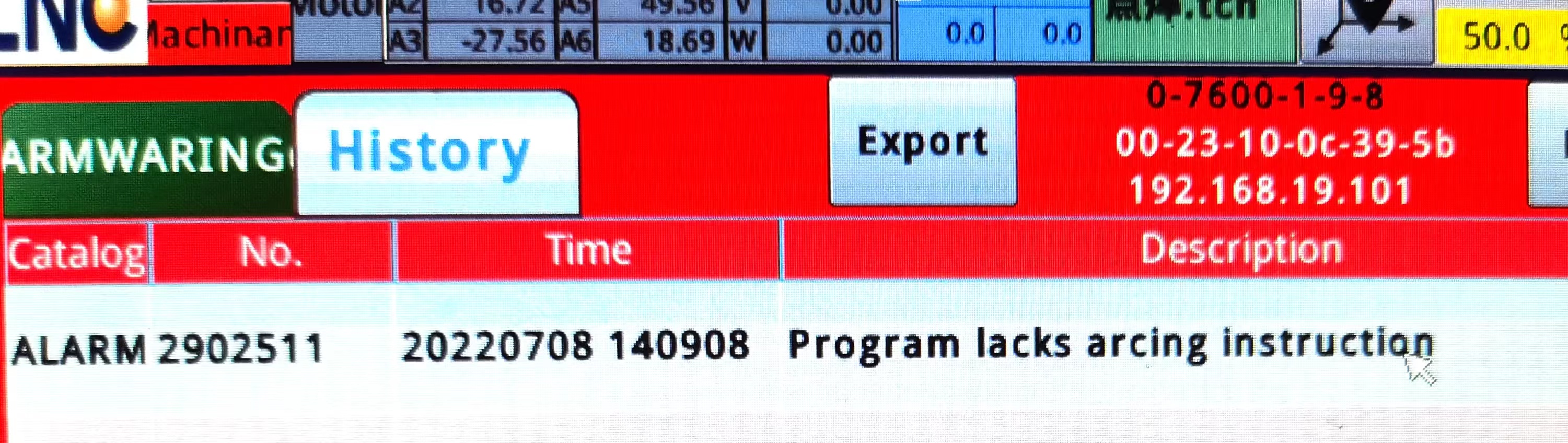
เหตุผล: ไม่มีคำสั่งเริ่มต้นอาร์คที่สอดคล้องกันก่อนที่จะดำเนินการคำสั่งสิ้นสุดอาร์คในโปรแกรมที่แก้ไข
วิธีการประมวลผล: ตรวจสอบว่าจะเพิ่มคำสั่งสิ้นสุดส่วนโค้งอีกหนึ่งคำสั่งหรือคำสั่งเริ่มต้นส่วนโค้งน้อยลงหนึ่งคำสั่ง
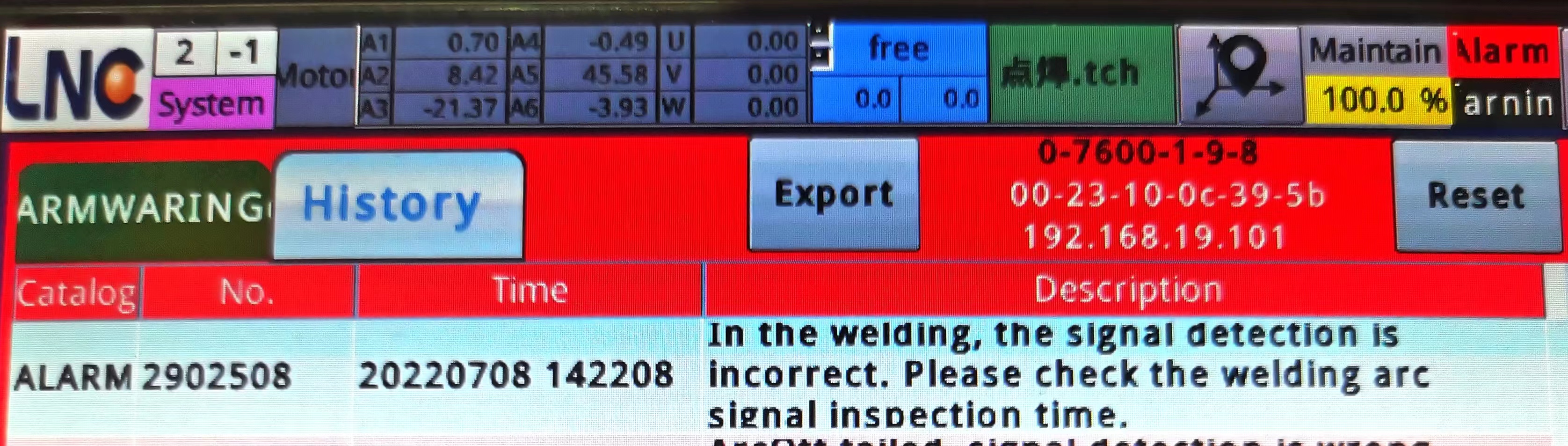
2. ไม่สามารถเริ่มอาร์คได้ การตรวจจับสัญญาณไม่ถูกต้อง
เข้าใกล้:
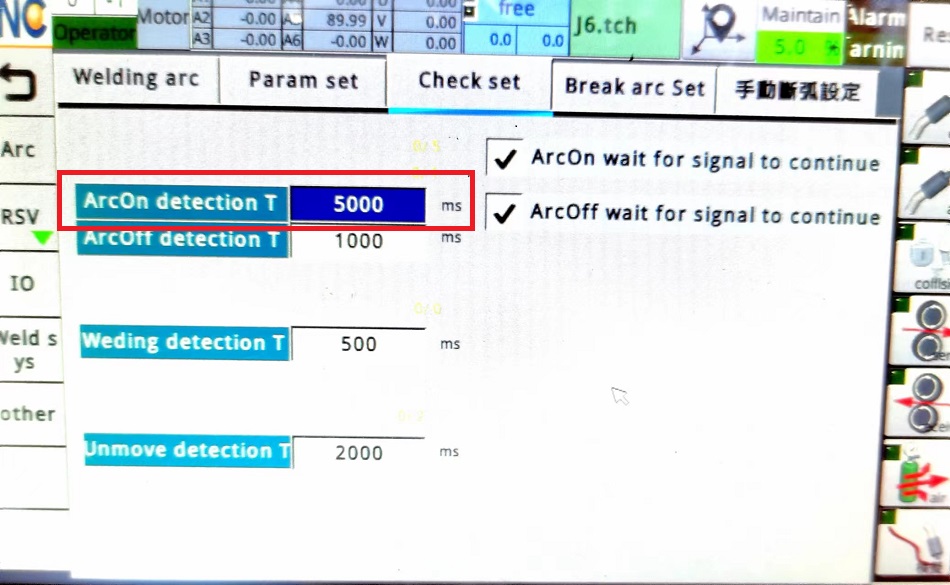
1) ตรวจสอบการตั้งค่าเวลาหยุดการเชื่อมในหน้าพารามิเตอร์ โดยทั่วไปควรตั้งค่าเวลาเป็น 5,000 มิลลิวินาที
2) ตรวจสอบว่าสัญญาณเครื่องเชื่อมส่งไปยังระบบได้สำเร็จหรือไม่
3) ตรวจสอบว่าชิ้นงานมีการต่อลงดินหรือไม่
3. ลวดทอดอาร์ค
เหตุผล:
1) กระแสและแรงดันไฟไม่ตรงกัน
วิธีการประมวลผล: เราต้องตั้งค่ากระแสและแรงดันไฟฟ้าที่เหมาะสมตามความหนาจริงของชิ้นงานและเครื่องเชื่อม
2) ความยาวของลวดเชื่อมยาวเกินไป
วิธีการรักษา: โดยทั่วไปความยาวของลวดเชื่อมจะมีความยาว 10 ถึง 15 เท่าของเส้นผ่านศูนย์กลางของลวดเชื่อม โดยเลือกความยาวลวดเชื่อมที่เหมาะสมตามเส้นผ่านศูนย์กลางของลวดเชื่อม

กระแสไฟฟ้าน้อยเกินไปทำให้รอยเชื่อมไม่สม่ำเสมอ

กระแสและแรงดันไฟปกติ เชื่อมได้สวยงามและแน่นหนา

ปลายคบไฟเชื่อมจะจับลวด

ปลายลวดเชื่อมอยู่ในสภาพดีหลังการเชื่อมปกติ
4. ปรากฏการณ์การดับอาร์คอัตโนมัติเกิดขึ้นหลังจากเกิดอาร์ค
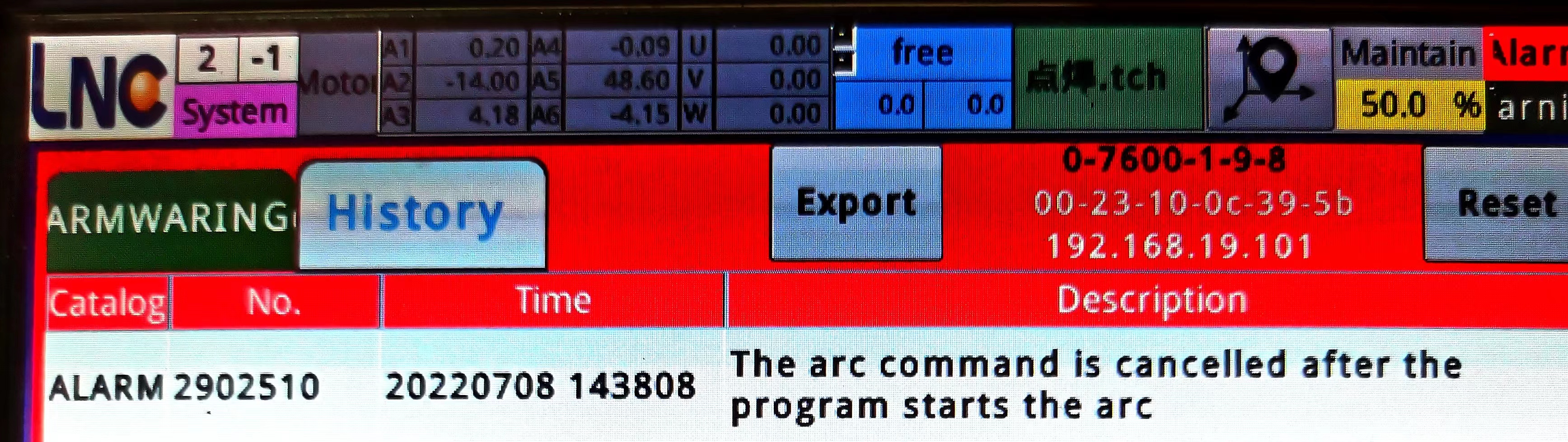
วิธีแก้ไข: ตรวจสอบว่ามีปัญหาเกี่ยวกับการตั้งค่าเวลาพารามิเตอร์ที่ไม่เคลื่อนไหวหรือไม่ และตรวจสอบว่าคบเชื่อมได้เคลื่อนที่หรือไม่
2. เกิดการแตกของอาร์คในระหว่างการเชื่อม
เหตุผล:
1. หากลวดเชื่อมไม่สัมผัสกับชิ้นงาน สัญญาณเตือนการตัดอาร์คจะดังขึ้น
วิธีการรักษา: ปรับตำแหน่งของลวดเชื่อมและชิ้นงานใหม่ เพื่อให้ลวดเชื่อมสัมผัสกับชิ้นงานอย่างเต็มที่ในระหว่างกระบวนการเชื่อม (แต่ไม่ควรอยู่ใกล้ชิ้นงานมากเกินไป เพราะอาจทำให้เชื่อมทะลุชิ้นงานได้)
2. เส้นทางการเชื่อมที่ไม่สมเหตุสมผลทำให้หัวปืนยกขึ้นโดยอัตโนมัติเนื่องจากการชนกัน
วิธีแก้ไข: รีเซ็ตเส้นทางการเชื่อม
3. สายไฟบวกและลบของเครื่องเชื่อมมีการสัมผัสที่ไม่ดี
วิธีการรักษา : ตรวจสอบสภาพสายไฟขั้วบวกและขั้วลบ
3. สาเหตุที่การอาร์คปลายเชื่อมไม่สำเร็จ
1. ความล้มเหลวของอาร์ค ข้อผิดพลาดในการตรวจจับสัญญาณ
สาเหตุ: เครื่องเชื่อมไม่ได้รับสัญญาณจากหุ่นยนต์ ทำให้หุ่นยนต์ไม่สามารถปิดอาร์คได้
เข้าใกล้:
(1) ตรวจสอบว่าพารามิเตอร์การตั้งค่าเหมาะสมหรือไม่
(2) ตรวจสอบสัญญาณ IO และตรวจสอบว่าสัญญาณของจุดสิ้นสุด I ผิดปกติหรือไม่ หากสัญญาณจุด I ยังคงแสดงว่าเปิดอยู่
(3) ตรวจสอบว่ามีไฟฟ้าลัดวงจรในสายหรือไม่ และสายดินเชื่อมต่อผิดปกติหรือไม่
2. ไม่มีการตั้งค่าคำสั่งหยุดอาร์คหลังจากการโจมตีอาร์ค

เหตุผล: เมื่อสัญญาณเตือนนี้เกิดขึ้นบนจี้สอน ให้ตรวจสอบว่าคุณลืมเพิ่มคำสั่งสิ้นสุดอาร์คหรือไม่
วิธีการประมวลผล: เพิ่มคำสั่งสิ้นสุดอาร์คหลังคำสั่งเริ่มต้นอาร์คในโปรแกรม
ฉบับนี้จะแนะนำปัญหาที่เกี่ยวข้องกับการเริ่มต้นอาร์ค การตัดอาร์ค และการสิ้นสุดอาร์คของหุ่นยนต์เชื่อม Yunhua ในระหว่างกระบวนการเชื่อม หากผู้ใช้พบปัญหาเหล่านี้ระหว่างการใช้งาน พวกเขาสามารถอ้างอิงถึงวิธีแก้ไขได้ หากไม่สามารถแก้ไขได้ โปรดติดต่อช่างเทคนิค Yunhua ทันที
หากคุณต้องการทราบปัญหาทั่วไปและวิธีแก้ไขเพิ่มเติมของ Yunhua Robot โปรดดูที่บัญชีอย่างเป็นทางการของ Yunhua Robot
หุ่นยนต์เชื่อม Yunhua เป็นหุ่นยนต์อัตโนมัติที่ผสานการเชื่อมแบบหลายฟังก์ชัน เช่น การเชื่อมด้วยแก๊สป้องกัน การเชื่อมด้วยอาร์กอน การตัดพลาสม่า และการเชื่อมด้วยเลเซอร์ หุ่นยนต์นี้มีความยืดหยุ่นสูง ปรับตัวได้ดี มีประสิทธิภาพในการเชื่อมสูง และคุณภาพการเชื่อมที่เสถียร และสามารถใช้ได้อย่างกว้างขวางในหลากหลายสาขา เช่น การผลิตเครื่องจักร การผลิตยานยนต์ อิเล็กทรอนิกส์แม่นยำ การทำเหมืองถ่านหิน และสาขาอื่นๆ
เวลาโพสต์ : 15 ก.ค. 2565



