การเชื่อมด้วย Robotic Mig ----วิธีการเชื่อมเสาโคมไฟถนน
ดัชนี
1. ข้อมูลชิ้นงาน
2. ภาพรวมโซลูชันการเชื่อมด้วยหุ่นยนต์
3. กระบวนการเชื่อมด้วยหุ่นยนต์
4. การกำหนดค่าอุปกรณ์โซลูชันหุ่นยนต์
5. หน้าที่หลัก 6. การแนะนำอุปกรณ์
7. การติดตั้ง การว่าจ้าง และการฝึกอบรม
8. ตรวจสอบและยอมรับ
9. ข้อกำหนดด้านสิ่งแวดล้อม
10. การรับประกันและบริการหลังการขาย
11. เอกสารแนบการจัดส่ง
วิดีโอแอปพลิเคชันการเชื่อมด้วยหุ่นยนต์
1, ข้อมูลชิ้นงาน
-เส้นผ่านศูนย์กลางลวดเชื่อม: Ф1.2mm
-กระบวนการเชื่อม: การเชื่อมแบบหุ้มด้วยแก๊ส/การเชื่อมแบบมิก
-แบบรอยเชื่อม: ชนิดเส้นตรง ชนิดวงกลม
-ป้องกันแก๊ส:99% CO2
-วิธีการใช้งาน: การขนถ่ายด้วยมือ, การเชื่อมอัตโนมัติของหุ่นยนต์
-ติดตั้งผิดพลาด:≤ 0.5mm
-การทำความสะอาดจาน :เงาโลหะสามารถเห็นได้ในรอยเชื่อมและภายในช่วงความสูงสองเท่าของรอยเชื่อมทั้งสองด้าน
2 ภาพรวมโซลูชันการเชื่อมด้วยหุ่นยนต์
เพื่อปรับปรุงประสิทธิภาพการทำงาน ตามสถานการณ์จริงของชิ้นงาน โรงงาน Honyen จะจัดเตรียมชุดของเวิร์กสเตชันหุ่นยนต์เชื่อม ซึ่งสามารถแทนที่ด้วยเครื่องมือที่แตกต่างกันเพื่อให้เข้ากันได้กับผลิตภัณฑ์ที่แตกต่างกันเวิร์กสเตชันประกอบด้วยโมเดลหุ่นยนต์: หุ่นยนต์เชื่อม HY1006A-145 แหล่งพลังงานเชื่อม ไฟฉายสำหรับเชื่อมแบบพิเศษสำหรับหุ่นยนต์ ตู้ควบคุมไฟฟ้าและปุ่มต่างๆ เครื่องทำน้ำเย็น ตัวกำหนดตำแหน่งสถานีงานคู่ อุปกรณ์ติดตั้ง รั้วป้องกันความปลอดภัย (อุปกรณ์เสริม) และอื่นๆ ชิ้นส่วน
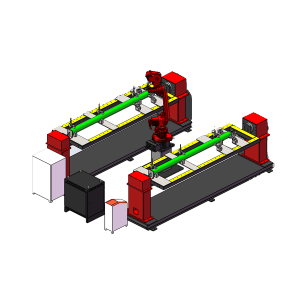
3, แนะนำเค้าโครงเวิร์กสเตชันหุ่นยนต์ Mig Welding
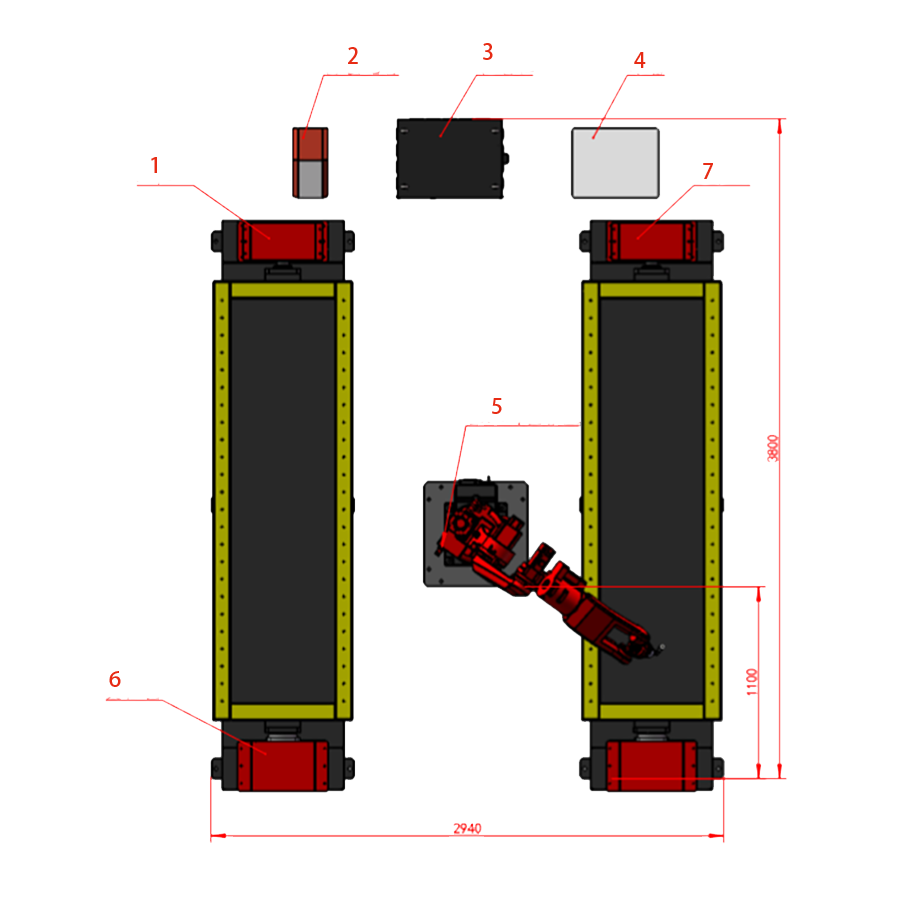
เค้าโครงเวิร์กสเตชันการเชื่อมอาร์คหุ่นยนต์ Honyen
1, สถานีงาน 1
2, แหล่งพลังงานเชื่อม
3, ตัวควบคุมหุ่นยนต์
4, เครื่องทำน้ำเย็น
5, Honyen หุ่นยนต์เชื่อมอาร์ค, HY1006A-145
6, ตัวกำหนดตำแหน่ง
7, สถานีงาน2
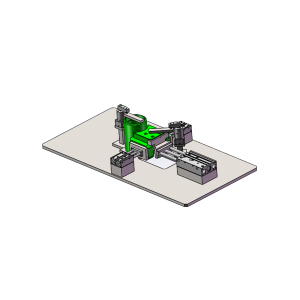
ติดตั้งชิ้นส่วนเสาไฟฟ้า
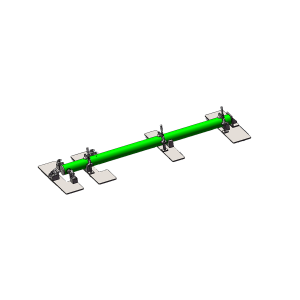
ติดตั้งชิ้นส่วนเสาไฟฟ้า2
โซลูชันการเชื่อมด้วยหุ่นยนต์ เค้าโครง 1
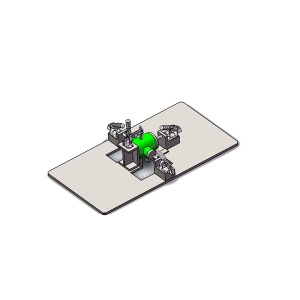
ชิ้นส่วนเสาไฟฟ้า Fixtures 3
โซลูชันการเชื่อมด้วยหุ่นยนต์ เค้าโครง2
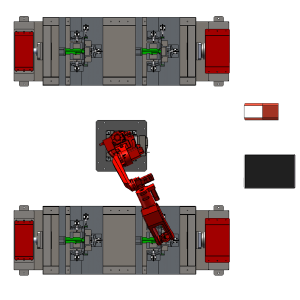
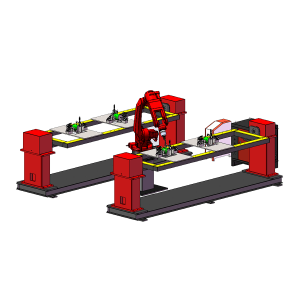
โซลูชันการเชื่อมด้วยหุ่นยนต์ เค้าโครง 3
4. กระบวนการเชื่อมด้วยหุ่นยนต์ I. ผู้ปฏิบัติงานโหลดชิ้นงานที่สถานี 1 หลังจากโหลดและจับยึดแล้วผู้ปฏิบัติงานกดปุ่มเริ่มต้นการจองหุ่นยนต์ 1 และหุ่นยนต์จะเริ่มการเชื่อมอัตโนมัติ
ครั้งที่สองผู้ปฏิบัติงานไปที่สถานี 2 เพื่อโหลดชิ้นงานหลังจากโหลดชิ้นงาน เจ้าหน้าที่จะกดปุ่มเริ่มการจองหุ่นยนต์ 2 และรอจนกว่าหุ่นยนต์จะเสร็จสิ้นการเชื่อม
สาม.หลังจากที่หุ่นยนต์เสร็จสิ้นการเชื่อมที่สถานี 1 หุ่นยนต์จะดำเนินการโปรแกรมของสถานี 2 โดยอัตโนมัติ
.จากนั้นผู้ปฏิบัติงานจะทำการขนถ่ายชิ้นงานที่สถานี 1 และบรรจุชิ้นงานใหม่
ก. วนไปตามลำดับ.
5. การกำหนดค่าอุปกรณ์โซลูชันหุ่นยนต์
| สิ่งของ | แบบอย่าง | ปริมาณ | ยี่ห้อ | หมายเหตุ | ||
| 1 | 1.1 | ตัวหุ่นยนต์ | HY1006A-145 | 1 ชุด | Honyen | รวมถึงตัวหุ่นยนต์ ตู้ควบคุม การสอนโปรแกรมเมอร์ |
| 1.2 | ตู้ควบคุมหุ่นยนต์ | 1 ชุด | ||||
| 1.3 | แหล่งพลังงานเชื่อม | 1 ชุด | Honyen | ช่างเชื่อมเม็กมีท | ||
| 1.4 | ถังเก็บน้ำ | 1 ชุด | Honyen | |||
| 1.5 | ไฟฉายเชื่อมระบายความร้อนด้วยน้ำ | 1 ชุด | Honyen | |||
| 2 | ตัวกำหนดตำแหน่ง 1 แกน | HY4030 | 2 ชุด | Honyen | 2.5 ม. โหลด 300 กก. กำลังขับ 1.5KW ที่กำหนด | |
| 3 | สถานีควบคุมไฟฟ้า | 2 ชุด | Honyen | |||
| 4 | การออกแบบระบบ การบูรณาการ และการเขียนโปรแกรม | 1 ชุด | Honyen | |||
| 5 | รั้วความปลอดภัย | 1 ชุด | Honyen | ไม่จำเป็น | ||
6. หน้าที่หลัก เพื่อให้มั่นใจในคุณภาพและประสิทธิภาพในการเชื่อม ระบบหุ่นยนต์จึงติดตั้งฟังก์ชั่นการป้องกันตัวเองที่สมบูรณ์แบบและฐานข้อมูลการเชื่อมอาร์กหน้าที่หลักมีดังนี้:
กลับสู่เส้นทางเดิม: เมื่อโล่การไหลของก๊าซผิดปกติ ลวดเชื่อมถูกใช้และหยุดชั่วคราวระหว่างการเชื่อม คำสั่ง "เชื่อมต่อ" สามารถเรียกได้โดยตรงหลังจากการแก้ไขปัญหา และหุ่นยนต์สามารถดำเนินการเชื่อมต่อโดยอัตโนมัติจากตำแหน่งใดๆ ไปยังตำแหน่งที่ถูกระงับ
การตรวจจับข้อผิดพลาดและการทำนาย: หลังจากเกิดสัญญาณเตือน หุ่นยนต์จะรับข้อมูลจากอุปกรณ์ควบคุม เก็งกำไรชิ้นส่วนที่มีข้อบกพร่อง และแสดงรายการชิ้นส่วนที่มีข้อบกพร่องสูงตามลำดับ แสดงลำดับของการเปลี่ยนส่วนประกอบและการวินิจฉัยบนคอมพิวเตอร์ ซึ่งสามารถดูได้บนไซต์ด้วยจี้สำหรับการสอนนอกจากนี้ คอมพิวเตอร์อย่างสม่ำเสมอ รับข้อมูลการทำงานจากหุ่นยนต์ วิเคราะห์ข้อมูลที่ได้รับ ตัดสินว่าสถานะการทำงานของหุ่นยนต์เป็นปกติหรือไม่ และแจ้งให้ผู้ใช้จัดการกับข้อผิดพลาดที่จะเกิดขึ้น
ฟังก์ชั่นป้องกันการชนกัน: เมื่อหุ่นยนต์หัวเชื่อมชนกับวัตถุภายนอก อุปกรณ์ป้องกันการชนกันของหุ่นยนต์ทำงานเพื่อป้องกันไฟฉายเชื่อมและตัวหุ่นยนต์
ฐานข้อมูลผู้เชี่ยวชาญ: โดยการตั้งค่าเงื่อนไขการเชื่อมที่จำเป็นในโปรแกรม ระบบนี้สามารถจัดเรียงตะเข็บเชื่อมและปรับพารามิเตอร์การเชื่อมที่เกี่ยวข้องได้โดยอัตโนมัติ
การสอนและการเขียนโปรแกรม: ตระหนักถึงการเขียนโปรแกรมในสถานที่ผ่านการสอนจี้
เชื่อมสาน: ในระหว่างกระบวนการเชื่อม หุ่นยนต์ไม่เพียงแต่สามารถรับรู้ถึงการเชื่อมแบบวงสวิงทั่วไปและแบบ Z เท่านั้นซึ่งช่วยให้หุ่นยนต์ทราบถึงฟังก์ชันการเชื่อมแบบสวิงของลูกค้าตามรูปร่างของชิ้นงาน เพื่อเพิ่มความกว้างของรอยเชื่อมด้วยความแข็งแรงในการเชื่อมและประสิทธิภาพการเชื่อมที่ดี
การแสดงสถานะ: หุ่นยนต์สามารถแสดงสถานะการทำงานของระบบหุ่นยนต์ทั้งหมดได้ผ่านตัวจับสัญญาณ รวมถึงสถานะการทำงานของโปรแกรม การเปลี่ยนแปลงพารามิเตอร์กระบวนการเชื่อม การเปลี่ยนแปลงพารามิเตอร์ระบบ ตำแหน่งปัจจุบันของหุ่นยนต์ บันทึกประวัติการดำเนินการ สัญญาณความปลอดภัย บันทึกการเตือนภัย ฯลฯ เพื่อให้ลูกค้าสามารถ เข้าใจสถานะของระบบหุ่นยนต์ได้ทันท่วงทีและป้องกันปัญหาล่วงหน้า
ไฟล์อินพุต / เอาท์พุต: ไฟล์ระบบหุ่นยนต์และไฟล์โปรแกรมในระบบหุ่นยนต์สามารถเก็บไว้ในการ์ด SD ภายใน Robot controller และยังสามารถบันทึกไปยังอุปกรณ์ภายนอกได้อีกด้วยโปรแกรมที่เขียนโดยซอฟต์แวร์การเขียนโปรแกรมออฟไลน์ยังสามารถโหลดลงใน Robot controller ซึ่งช่วยให้ลูกค้าสำรองไฟล์ระบบอย่างสม่ำเสมอ เมื่อมีปัญหาในระบบหุ่นยนต์ ข้อมูลสำรองเหล่านี้สามารถกู้คืนเพื่อแก้ไขปัญหาของหุ่นยนต์ได้
7 การแนะนำอุปกรณ์ HY1006A-145 เป็นหุ่นยนต์ประสิทธิภาพสูงพร้อมฟังก์ชันอัจฉริยะเหมาะสำหรับงานเชื่อมและตัดแบบหุ้มด้วยแก๊สลักษณะเฉพาะคือน้ำหนักเบาและโครงสร้างที่กะทัดรัด
สำหรับงานเชื่อมอาร์ก Honyen ประสบความสำเร็จในการออกแบบแขนกลที่มีน้ำหนักเบาและกะทัดรัด ซึ่งไม่เพียงแต่รับประกันความน่าเชื่อถือดั้งเดิมเท่านั้น แต่ยังให้ประสิทธิภาพด้านต้นทุนที่ยอดเยี่ยมอีกด้วย
Honyen ใช้เทคโนโลยีเซอร์โวที่ล้ำหน้าที่สุด ซึ่งสามารถปรับปรุงความเร็วในการเคลื่อนที่และความแม่นยำของหุ่นยนต์ ลดการแทรกแซงของผู้ปฏิบัติงาน และปรับปรุงประสิทธิภาพการทำงานสำหรับการเชื่อมและการตัดที่หุ้มด้วยแก๊ส
| แกน | น้ำหนักบรรทุก | ความสามารถในการทำซ้ำ | กำลังไฟฟ้า | สิ่งแวดล้อม | น้ำหนัก | การติดตั้ง |
| 6 | 10 | 0.08 | 6.5KVA | 0 ~ 45 ℃ 20 ~ 80% RH (ไม่มีความชื้น) | 300กก. | พื้นดิน/เพดาน |
| ช่วงการเคลื่อนไหว J1 | J2 | J3 | J4 | J5 | J6 | ระดับ IP |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65 (ข้อมือ) |
| ความเร็วสูงสุด J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/วินาที | 145°/วินาที | 140 °/วินาที | 217°/วินาที | 172°/วินาที | 500 °/วินาที |
อินเทอร์เฟซการทำงานภาษาจีนเต็มรูปแบบและสามารถเปลี่ยนเป็นภาษาอังกฤษได้โดยใช้แป้นพิมพ์เต็มรูปแบบ
รองรับการสื่อสารที่หลากหลายรวมถึงอินเทอร์เฟซ I / O, Modbus, Ethernet เป็นต้น
รองรับการเชื่อมต่อกับหุ่นยนต์หลายตัวและอุปกรณ์ภายนอกอื่นๆ
หน้าจอสัมผัสสีสันสดใสขนาดใหญ่
กำหนดค่าอุปกรณ์ป้องกันการชนกัน ปกป้องแขนหุ่นยนต์และลดการรบกวน
Robot Motion control ให้การวางแผนเส้นทางที่เหมาะสมที่สุด
กระเป๋าและฟังก์ชันในตัวนับร้อยช่วยให้การเขียนโปรแกรมง่ายขึ้น
ผ่านการ์ด SD สะดวกในการสำรองและคัดลอกข้อมูล
ตัวกำหนดตำแหน่ง

Honyen Head-tail double support positioner ซึ่งใช้ในการหมุนชิ้นงาน ร่วมมือกับหุ่นยนต์ เข้าถึงตำแหน่งที่ดีสำหรับการเชื่อมและได้ประสิทธิภาพการเชื่อมที่ดี
แหล่งพลังงานเชื่อม

Megmeet Ehave cm 500h / 500 / 350 series อุตสาหกรรมหนักแบบดิจิตอลเต็มรูปแบบ * CO2 / MAG / MMA เครื่องเชื่อมอัจฉริยะ
8. การติดตั้ง การว่าจ้าง และการฝึกอบรม
ก่อนส่งมอบ ระบบหุ่นยนต์จะถูกประกอบและทดสอบการทำงานอย่างเต็มรูปแบบในบริษัทของเราลูกค้าจะจัดส่งชิ้นส่วนให้กับบริษัทของเราเพื่อทดลองเชื่อมและยอมรับล่วงหน้าก่อนส่งมอบในระหว่างการตอบรับล่วงหน้า เจ้าหน้าที่ปฏิบัติงานของลูกค้าจะได้รับการฝึกอบรมด้านเทคนิคเบื้องต้น
แผนการติดตั้งและข้อกำหนดทางเทคนิคจะถูกส่งไปยังลูกค้า 15 วันก่อนการติดตั้ง และลูกค้าจะต้องเตรียมการตามข้อกำหนดในเวลาที่เหมาะสมบริษัทของเราจะส่งวิศวกรไปดำเนินการติดตั้งและทดสอบระบบที่ไซต์ของผู้ใช้ภายใต้เงื่อนไขที่ลูกค้าต้องแน่ใจว่ามีชิ้นงานทดสอบเดินเครื่องเพียงพอ เวลาตั้งแต่การเริ่มโปรแกรมการว่าจ้าง การฝึกอบรมบุคลากรจนถึงการผลิตแบบทดลองจำนวนมากจะต้องไม่เกิน 10 วันบริษัทของเราฝึกอบรมผู้ใช้การเขียนโปรแกรมระบบหุ่นยนต์ การทำงานและการบำรุงรักษาให้กับลูกค้า และผู้ฝึกงานควรมีความรู้พื้นฐานเกี่ยวกับคอมพิวเตอร์
ระหว่างการติดตั้งและการว่าจ้าง ลูกค้าจะต้องจัดเตรียมเครื่องมือที่จำเป็น เช่น อุปกรณ์ยก รถยก สายเคเบิล สว่านกระแทก ฯลฯ และให้ความช่วยเหลือชั่วคราวระหว่างการขนถ่ายและติดตั้ง
บริษัทของเรามีหน้าที่ให้คำแนะนำ การติดตั้ง การว่าจ้างอุปกรณ์ และการฝึกอบรมของผู้ปฏิบัติงานบริษัทของเรามีหน้าที่รับผิดชอบในการฝึกอบรมการบำรุงรักษาและการปฏิบัติงานผู้ปฏิบัติงานจะดำเนินการและบำรุงรักษาอุปกรณ์ด้วยตนเองเนื้อหาการฝึกอบรม: หลักการโครงสร้างอุปกรณ์ การแก้ไขปัญหาทั่วไปเกี่ยวกับไฟฟ้า คำแนะนำในการเขียนโปรแกรมเบื้องต้น ทักษะการเขียนโปรแกรมและวิธีการเขียนโปรแกรมของชิ้นส่วนทั่วไป บทนำและข้อควรระวังของแผงการทำงานของอุปกรณ์ แนวทางปฏิบัติในการทำงานของอุปกรณ์ ฯลฯ
9. ตรวจสอบและยอมรับ
บริษัทของเราดำเนินการยอมรับล่วงหน้าโดยมีส่วนร่วมของผู้ปฏิบัติงานที่เกี่ยวข้องของทั้งสองฝ่ายระหว่างก่อนการยอมรับ ชิ้นงานจะต้องได้รับการทดสอบตามความถูกต้องของชิ้นงานที่ลูกค้าให้มา เฉพาะชิ้นงานที่ผ่านการรับรองเท่านั้นที่จะเชื่อม และจะต้องออกรายงานการทดสอบก่อนการยอมรับหลังจากเสร็จสิ้นการยอมรับ หุ่นยนต์จะถูกส่งเพื่อให้แน่ใจว่ามีการยอมรับล่วงหน้า จะมีการจัดเตรียมชิ้นงาน 3 ชิ้นสำหรับการผลิตตามปกติ
10.ข้อกำหนดด้านสิ่งแวดล้อม ข้อกำหนดด้านความปลอดภัย: ก๊าซและชิ้นส่วนอะไหล่ที่ผู้ใช้ใช้ต้องเป็นไปตามมาตรฐานระดับประเทศที่เกี่ยวข้อง
แหล่งอากาศจะต้องตั้งไว้กลางแจ้ง ห่างจากไฟไม่น้อยกว่า 15 เมตร และห่างจากก๊าซและออกซิเจนไม่น้อยกว่า 15 เมตรแหล่งอากาศต้องรักษาสภาพการระบายอากาศที่ดีและอยู่ในที่เย็นห่างจากลม
ต้องตรวจสอบวงจรแก๊สทั้งหมดก่อนใช้หุ่นยนต์หากมีการรั่วของอากาศจะต้องได้รับการซ่อมแซมเพื่อให้แน่ใจว่าไม่มีข้อผิดพลาด
เมื่อปรับแรงดันและเปลี่ยนถังแก๊ส ผู้ปฏิบัติงานต้องไม่มีสารน้ำมันอยู่ในมือ
ความชื้นแวดล้อม: โดยทั่วไป ความชื้นแวดล้อมอยู่ที่ 20% ~ 75% RH (ในกรณีที่ไม่มีการควบแน่น)ระยะสั้น (ภายใน 1 เดือน) น้อยกว่า 95% RH (ในบางครั้งที่ไม่มีการควบแน่น)
อัดอากาศ: 4.5 ~ 6.0 kgf / cm2 (0.45-0.6mpa) กรองน้ำมันและน้ำ ≥ 100L / นาที
รากฐาน: ความแข็งแรงของคอนกรีตขั้นต่ำคือ C25 และความหนาของรากฐานขั้นต่ำคือ 400 mm
การสั่นสะเทือน: เก็บให้ห่างจากแหล่งกำเนิดการสั่นสะเทือน
แหล่งจ่ายไฟ: แหล่งจ่ายไฟของอุปกรณ์ไฟฟ้าและอิเล็กทรอนิกส์ที่ผลิตขึ้นทั้งหมดใช้แรงดันไฟฟ้ากระแสสลับสามเฟส 50Hz (± 1) และ 380V (± 10%) เพื่อให้แน่ใจว่ามีการต่อสายดินหลักของแหล่งจ่ายไฟ
บริการนอกสถานที่โดยลูกค้า:
การเตรียมการที่จำเป็นทั้งหมดก่อนส่งมอบ เช่น ฐานราก งานเชื่อมที่จำเป็น การซ่อมเครื่องมือเสริม ฯลฯ
ขนถ่ายและขนส่งที่ไซต์ของลูกค้า
11. การรับประกันและบริการหลังการขาย ระยะเวลาการรับประกันของแหล่งพลังงานเชื่อมคือ 12 เดือน
ระยะเวลาการรับประกันของตัวหุ่นยนต์คือ 18 เดือน
ในกรณีที่เกิดความล้มเหลวหรือเสียหายภายใต้การใช้งานปกติและอุปกรณ์อยู่ในระยะเวลารับประกัน บริษัทของเราสามารถซ่อมแซมหรือเปลี่ยนชิ้นส่วนได้ฟรี EXW (ยกเว้นวัสดุสิ้นเปลือง ผลิตภัณฑ์บำรุงรักษา ท่อนิรภัย ไฟแสดงสถานะ และวัสดุสิ้นเปลืองอื่น ๆ ที่บริษัทกำหนดเป็นพิเศษ)
สำหรับชิ้นส่วนที่เปราะบางที่ไม่มีการรับประกัน บริษัทของเราให้คำมั่นว่าจะมีอายุการใช้งานปกติและราคาจัดหาของชิ้นส่วนที่เปราะบาง และอุปกรณ์มีช่องทางการจัดหาอุปกรณ์ที่เสถียรนานถึงห้าปี
นอกระยะเวลาการรับประกัน บริษัทของเราจะยังคงให้บริการแบบชำระเงินตลอดชีวิตและให้การสนับสนุนด้านเทคนิคที่ครอบคลุมและอุปกรณ์เสริมที่จำเป็น
12. เอกสารแนบการจัดส่ง ภาพวาดการติดตั้ง: แบบก่อสร้างฐานรากอุปกรณ์และแบบติดตั้งอุปกรณ์
◆ ภาพวาดการออกแบบ: แบบติดตั้งและอุปกรณ์
◆ คู่มือ: คู่มือการใช้งานอุปกรณ์ คู่มือการบำรุงรักษา และคู่มือการใช้งานหุ่นยนต์
◆ อุปกรณ์เสริม: รายการจัดส่ง ใบรับรองและใบรับประกัน



